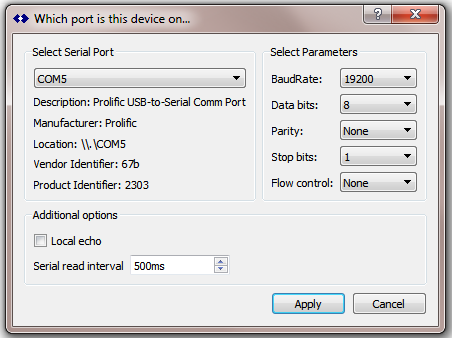
When sending serial message at rates over 1Hz, the serial read interval should be decreased from the nominal value of 500mS to half the period at which these messages will arrive. Unlike TCP/IP connections which are processed within one or two milliseconds of arrival, each serial port uses a polling process with timer. Failure to set a suitable time interval means that the incoming messages will be delayed before they are read in, processed, and send on to the rover devices. In extreme cases, messages can be lost due to limited memory and buffer resources in the GNSS device. SNIP will automatically readjust the starting time of the rate you select to align with the actual data arrival, so there is not need to “underset” the value. This control is found in the serial port setup dialog.
Some operators prefer a Base Station message rate of 2Hz, although there is considerable technical debate about the increased value (if any) to the rover devices from doubling the message rates. If seems fair to say that all subject mater experts agree that at even higher message rates, there is no value to typical rovers doing normal RTK filtering. Years of practical research indicate that the evolution and deviations of the signal themselves is well captured with a 1Hz rate. [And some systems use a 1/5 Hz message rate]. If in doubt for a specific application use, consult your GNSS vendor.
SNIP allows a range of from 50 to 5,000 milliseconds in this field. Using values in the range of 490~500 are common to support the normal 1Hz message rates. Values of 240~250 are recommend to support 2Hz message rates. If using higher rates, it is suggested to check that any USB device drivers used are not also buffering the data before sending.