In another post it was mentioned that we were running some short base line tests with uBlox6T devices. We commonly use these devices in our automotive safety testing. And we often co-mount them with more costly L1/L2 devices. For baselines of less then 12~15km these devices give very good performance if the longer acquisition time to get obtain correct AR fixing can be tolerated.
A user had asked to see the results of this RTK filter using a uBlox6T unit. So here it is using common RTKLIB tools. This is more of less typical on what you can expect to see with very good antenna placement between two static sites of under ~10km. The first of these shows the L1-only device with corrections provided from a high grade L1/L2 survey device. The second set of plots uses another L1-only uBlox6T device that is co-located with the high grade L1/L2 survey device as the base station. In neither of these plot sets is the ability of the L1/L2 ionosphere measurement pair used. The L1-only uBlox6T as a base station looks deceivingly good under such ideal conditions.
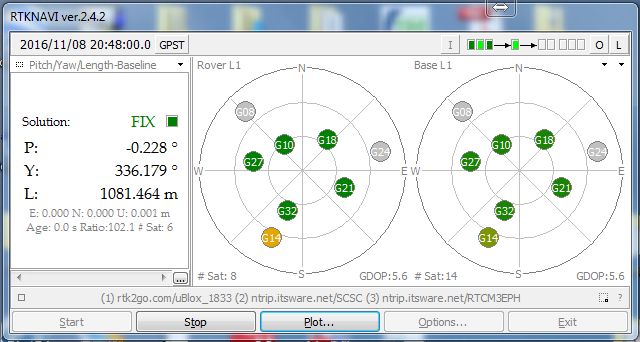
A static uBlox6T at a baseline of 1081.46 meters, corrections from an L1/L2 base station (mountPt SCSC).
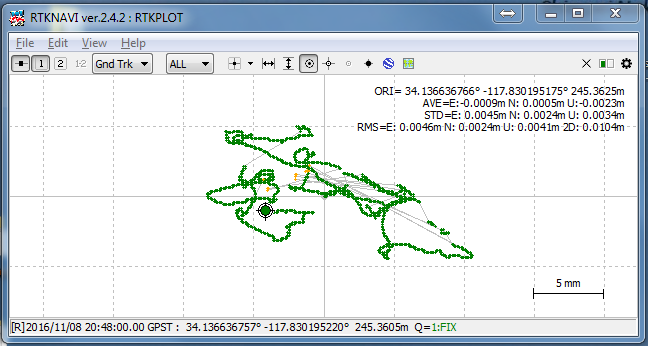
The resulting plot of position (note that the scale of 5mm per square is slightly larger than life sized).
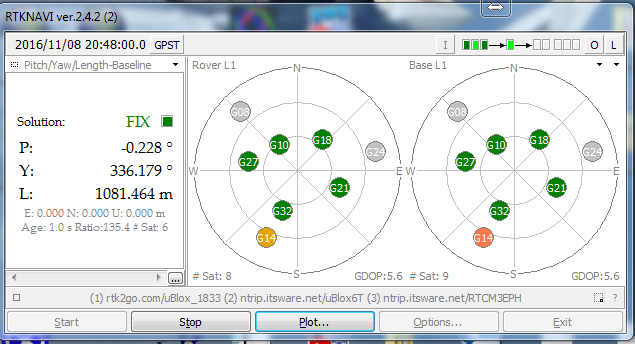
Repeating this with another uBlox6T as the base station
A static uBlox6T at a baseline of 1081.46 meters, corrections from another uBlox6T as the base station (mountPt uBlox6T).
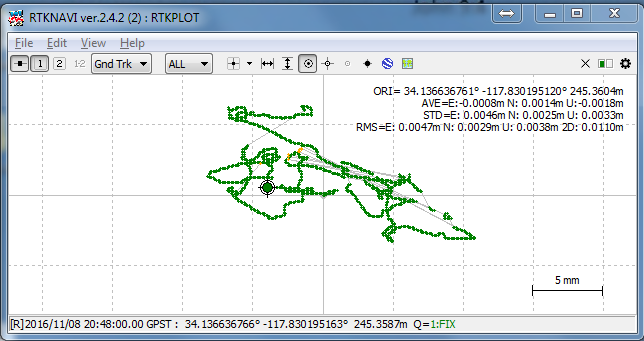
The resulting plot of position (note that the scale of 5mm per square is slightly larger than life sized).
Configuration details: Both base stations used a shared A52 antenna, while the rover used an Antcom 53GO1216A4-XS-1 antenna. As a rule the sky visibility was very good and the signal strength observed was strong (>40db).
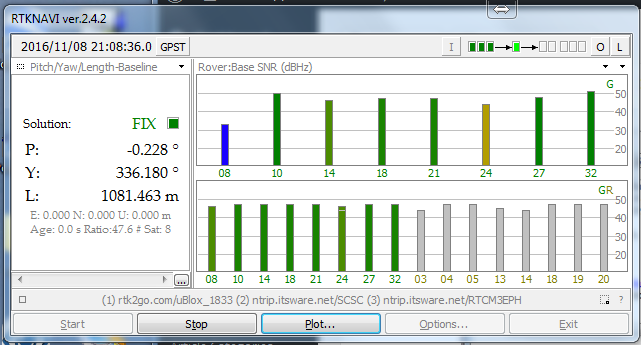
Filter settings: The setting for the RTKLIB (RTKNAVI ver 2.4.2) were as follow. Static RTK mode, elevation angle of 20 degrees, broadcast orbits, and continuous AR with a fixing ratio of 3 The RTKLIB GLONASS autocal feature was enabled but as the uBlox 6T device does not track GLONASS, these were all GPS L1 only runs.
Three SNIP Casters were used as follows. One SNIP Caster was placed on a retired PC next to the uBlox rover device. It was used to create a PUSH-out connection to send the uBlox data to the SNIP Caster operating the RTK2go.com network. On the machine running the two copies of RTKNAVI a connection to a third SNIP Caster running our open caster at NTRIP.itsware.net:2101 was made to provide an orbital data stream.