The Last Observation Flag translation is used to adjust the flags present in the RTCM3 messages which are used to indicate (to the rover devices) that the last set of observations at a given common time has been sent. By convention, GPS observations are always sent first, followed by GLO observations, followed by other GNSS types (QZSS, GAL, BDU, and SBAS when they are present). The very last message asserts this flag. This typically triggers navigation filter processing to occur in the rover device.
Use
When a given message observation type has been filtered out with any other PFAT methods, it is required that the new “last observation” now conveys this flag. [Failure to do this leaves the rover device hanging and waiting for the final message for the common epoch time which never arrives. As a result, the observation data is never used] The Last Observation Flag translation operates on RTCM3 message types 1001~1004 (GPS) and 1009~1012 (GLONASS).
This translation presents the SNIP operator with a dialog which shows all the observational messages that are present in the stream:
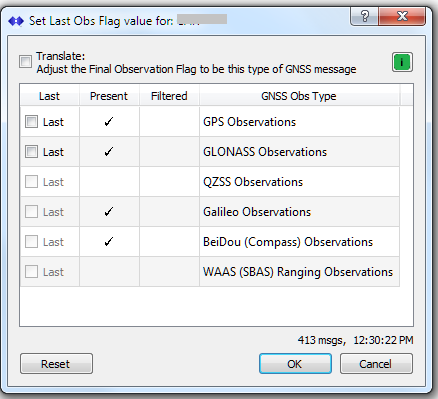
The checkbox in the column marked “Last” controls which RTCM message GNSS type will have the “last observation flag” in the message stream. When none are checked, this translate command has no effect. And like all translate commands, the master checkbox in the upper left corner is used to enable & disable the setting.
Only those GNSS observation types that are detected in the stream have enabled checkboxes. This is further indicated by the check mark in the column labeled “Present” in the above.
The column labeled “Present” indicates that some other PFAT setting has filtered (removed) the message. In general such content should be selected as the last observation.
Example
A common use of this translation is to combine it with a filter to remove GLO observations from a Base Station that provides GPS + GLO data. In addition (but not shown) the GLO message content would be removed using a suitable PFAT Filter translation. The settings would be as shown below.
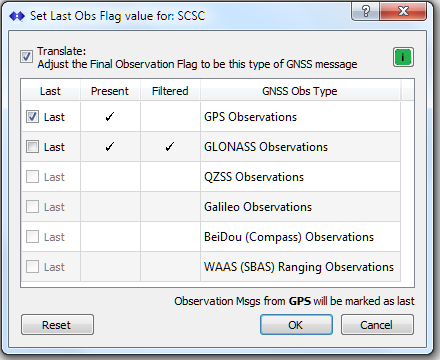
The resulting message stream would then contain only GPS data. And the last observation flag would be set for the GPS observation messages, rather than the GLO messages as before the translation was activated. Observe also that the GNSS type which are not present in this stream are disabled (grey).
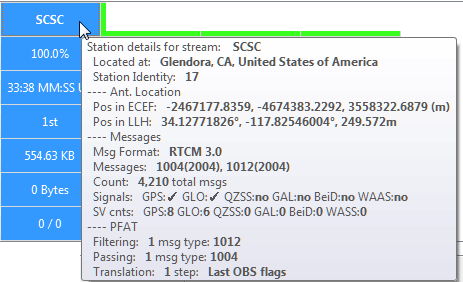
Tip: This setting can be quickly checked by looking at the bottom of the stream’s tool tip where a summary of active PFAT setting is shown. In the below you can see that MT1012 as been filtered out and that a new Last Obs flags setting is active.