Here are a few example Connections where a Virtual Reference Station (VRS) has been used to get slightly different corrections and data types. These were taken from a typical Leica system operating in Lombardy.
Terms
Users often have questions about the different types of Virtual Reference Station mount points that are offered. The Caster operator is your best source of reference but here are a few basic terminology hints. These terms are often used as part of a mountPt name.
DGPS = In this content this term implies that the older RTCM2.x message are being send in the stream, and further these are most likely to be types 18 and19. And not types 1 or 9 (even if the caster table incorrectly indicates that 1 and 9 are being sent – as many do). Types 1 and 9 provide the classic code level corrections used in DGPS.
FKP = A network based solution with of code and carrier using a system of gradient messages to describe the overall corrections environment (rather then corrections develop and suited to a unique position). It is in contrast to the MAC approach and has its own message types defined in RTCM.
iMAX = A Leica term for their iMAX network which uses a nearest physical reference station approach with various network correction adjustments.
MAC = A network based solution with of code and carrier using “Master – Axillary” methods (and messages) as defined in RTCM.
NEAR = Implies that the users NMEA sentence will be used to select the closest physical base station and the user will be connected to that. Also called a single baseline solution. SNIP provides this type.
NRT = Another term for NEAR
NRTK = Network RTK, a general term which can be applied to any of the terms / methods found here. As MAC and FKP methodologies have fallen out of favor, more and more solutions simply use single baseline approaches or create synthetic observations (using either legacy messages or MSM messages). NRTK is now the preferred term used for all of these.
VRS = Virtual Reference Station, what it means is subject to debate, often involving the above terms. Of importance to many is that it may not be “virtual” at all if the term is taken to mean creating some sort of non physical reference station that is synthesized between a network of physical stations. That is of course also done, with several benefits, but use of this term does not assure you that this is so. Nor is a virtual approach of any greater value that a suitable single baseline corrections stream but we digress.
[And the term VRS, while widely used for many of the above methods, is a copyright owned by Trimble]
Here is an very good article with more precise technical differences associated with these terms for this who are interested.
Examples
So if you connect to several of the “vrs” mount points in the same network with the same position in a NMEA-183 sentence, what does the Caster in fact send you? This boils down to a simple comparison of “What did I ask for” vs “What did I get” The answer will either a virtual location or the closest physical reference station in the network. And the answer to this is determined by the examining the EFEC message which each stream provides about its location. In fact, the MAP dialog does this for you so we will use it in this example.
The caster we are using in these examples is a Leica Spider system, located in the Lombardi region of Northern Italy, the caster table can be found at http://www.spingnss.it:2101/ It consists of a network of over 30 stations, but you cannot determine this from the few caster table entries below. A nice network map can be found here.
STR;DGPS_VRS_RTCM2;DGPS_VRS_RTCM2;RTCM 2;RTCM 2.3 (1,2,18,19);2;GPS;Rete SPIN GNSS;;0.00;0.00;1;1;Leica GNSS Spider;none;B;N;9600; STR;RTK_VRS_RTCM2;RTK_VRS_RTCM2;RTCM 2;;2;GPS & GLO;Rete SPIN GNSS;;0.00;0.00;1;1;Leica GNSS Spider;none;B;N;9600; STR;RTK_VRS_RTCM3;RTK_VRS_RTCM3;RTCM 3;;2;GPS & GLO;Rete SPIN GNSS;;0.00;0.00;1;1;Leica GNSS Spider;none;B;N;9600; STR;RTK_MAC/MAX_RTCM3;RTK_MAC/MAX_RTCM3;RTCM 3;;2;GPS & GLO;Rete SPIN GNSS;;0.00;0.00;1;1;Leica GNSS Spider;none;B;N;9600; STR;RTK_NRT_RTCM3;RTK_NRT_RTCM3;RTCM 3;;2;GPS & GLO;Rete SPIN GNSS;;0.00;0.00;1;0;Leica GNSS Spider;none;B;N;9600; STR;DGPS_NRT_RTCM2;DGPS_NRT_RTCM2;RTCM 2;RTCM 2.3 (1,2,18,19);2;GPS & GLO;Rete SPIN GNSS;;45.06;7.66;1;0;Leica GNSS Spider;none;B;N;9600; STR;DGPS_VRS_RTCM3;DGPS_VRS_RTCM3;RTCM 3;;2;GPS & GLO;Rete SPIN GNSS;;45.06;7.66;1;1;Leica GNSS Spider;none;B;N;9600;
In the below images we connected to two of these streams:
- VRS which returns a true virtual location
- iMAX which returns the closest physical station in the network
And all in RTCM3 formats, and then review the differences seen.
We connect using a rover location of Lat = 45.616872800, Long = 8.95709250 and a height of 43.000 meters (LL). This position was simply an interesting position chosen from Google and centered in a local traffic roundabout. Because we are “localizing” the VRS mountPt (whose LL entry is not of any use here), these LL values are then used by SNIP to create a correct and suitable Caster table entry for your end users to see. Note that in the images below the stream has been renamed “Rescaldina” to make the mountPr more useful for others.
The SNIP map is shown on the left, the remote-relay caster dialog settings are shown in the center, and the SNIP main window (showing the resulting caster entry for the stream) is to the right. Click on the images to enlarge them.
The VRS connection
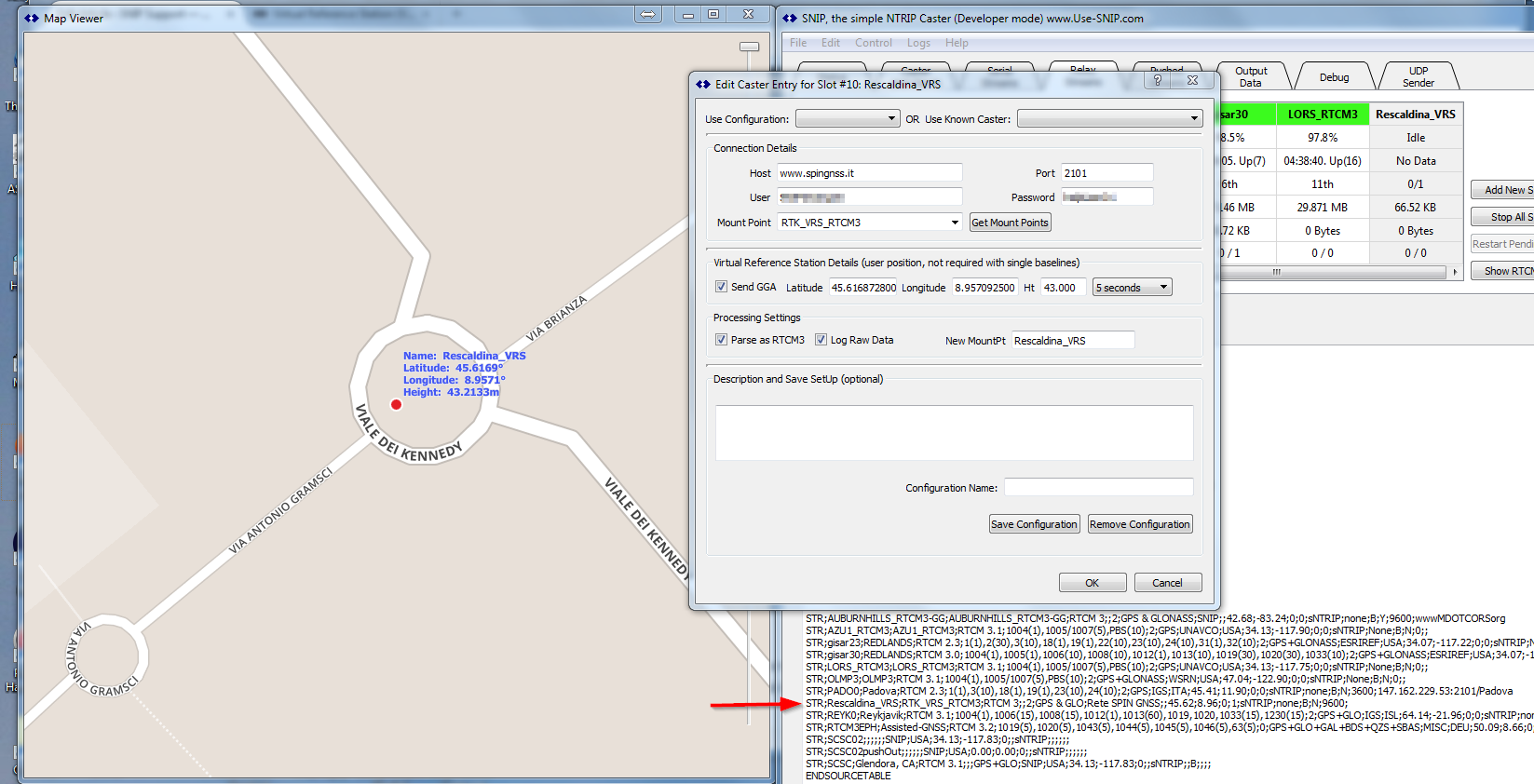
In this case the data stream location matches requested location to a fraction of a meter. This an example of an honest virtual data stream, as there is no reference station at this location.
The iMAX Connection
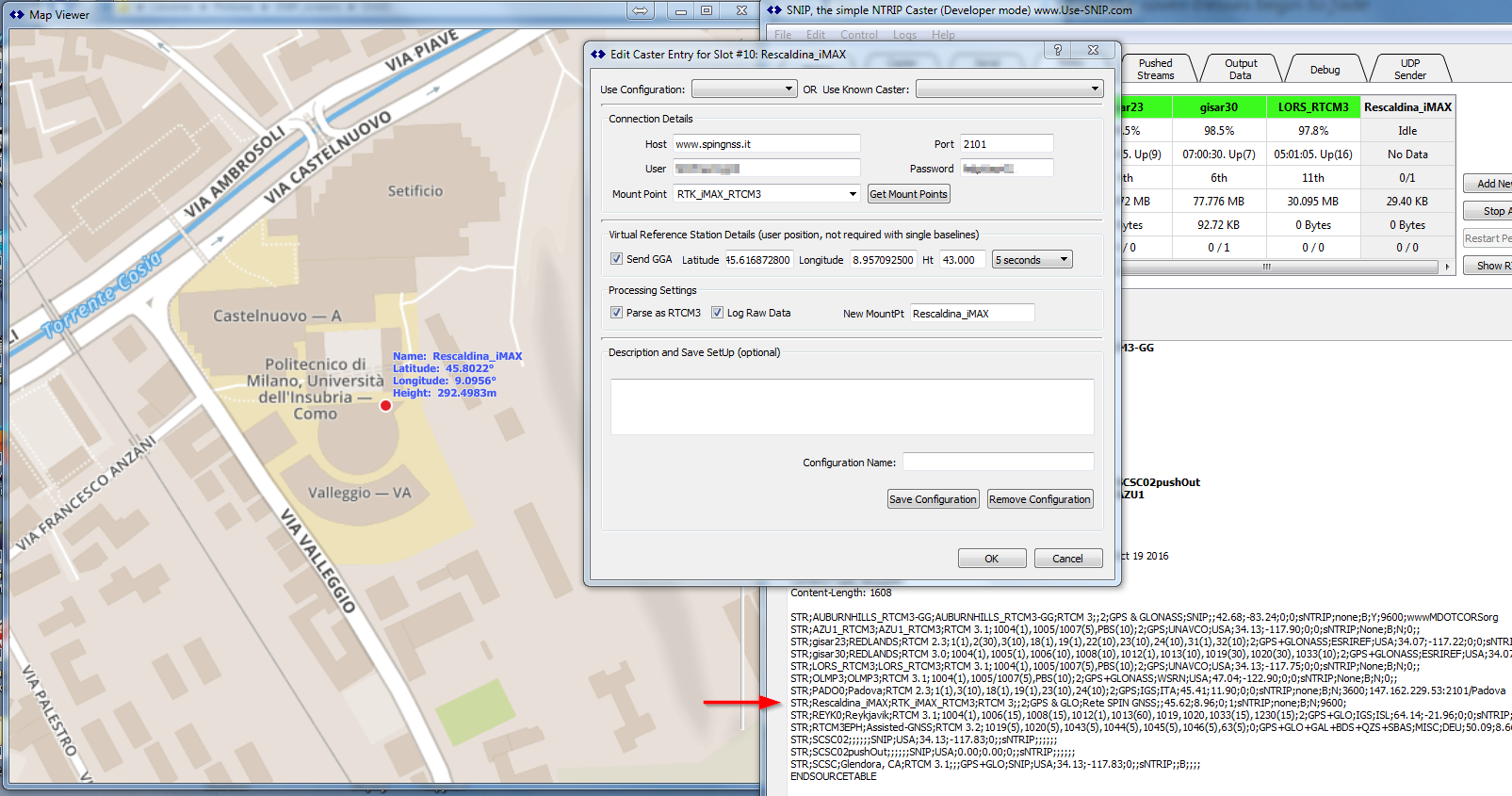
In this case the data stream location matches a nearby physical reference station (called NOVARA or NOVR). And further data about the station is often available from the network operator, as in this case.
This article serves to provide a two simple examples of how VRS network connections will vary and to define common terms used.
See also: SNIP uses a single baseline system called NEAR to achieve the same goals. You can read more about it in the tab description here or in this general article.